- dwukanałowy sterownik silników DC")
 - dwukanałowy sterownik silników DC")
 - dwukanałowy sterownik silników DC")
 - dwukanałowy sterownik silników DC - widok od góry")
 - dwukanałowy sterownik silników DC - widok od spodu")

869,94 zł Netto
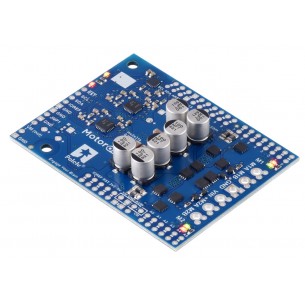
RoboClaw 2x30A Motor Controller (V5D) to dwukanałowy sterownik silników prądu stałego (DC), napięcie pracy: 6..34V, maksymalny prąd ciągły: 30A, możliwość łatwej realizacji pętli sprzężenia zwrotnego z regulatorem PID, systemy bezpieczeństwa. Pololu 3286

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
RoboClaw 2x30A Motor Controller (V5D) to dwukanałowy sterownik silników prądu stałego (DC), mogący niezależnie sterować pracą dwóch silników. Sterowanie może się odbywać poprzez port USB, szeregowy interfejs TTL, sygnał z odbiornika RC lub przez wejście analogowe. Sterownik posiada wbudowane dekodery enkoderów kwadraturowych, które umożliwiają łatwą implementację zamkniętej pętli sterowania prędkością obrotową silnika. Za dodatkowe, warte uwagi opcje należy uznać system odzysku energii podczas hamowania silnikiem, odporność na nagłe zmiany prędkości obrotowej (przy dużych obrotach silnika), oraz układ kontroli naładowania baterii i odcięcia w razie zbyt głębokiego rozładowania. Są to bardzo wygodne i użyteczne właściwości, które z pewnością uproszczą budowę nie jednej konstrukcji mobilnej.
Prezentowana wersja sterownika ma dwa kanały, z których każdy ma wydajność 30 A przy stałym poborze prądu, natomiast maksymalna wartość chwilowa pobieranego prądu wynosi 60 A. Wartość napięcia zasilającego silniki wynosi od 6 do 34 V.
W przeciwieństwie do starszych wersji sterownika (V5 i niższych) ta wersja ma plastikową podstawę, która chroni płytkę od spodu. Ta wersja ma również złącze do podłączenie opcjonalnego wentylatora do chłodzenia radiatora sterownika. Sterownik ma takie same wymiary jak jego poprzednicy, a rozmieszczenie takich elementów jak przyciski, wyprowadzenia goldpin, otwory montażowe, złącz nie uległo zmianie.
Cechy
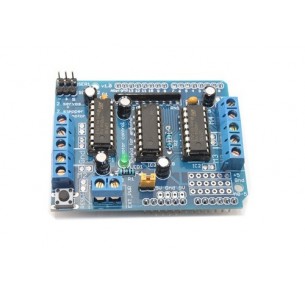
Moduł zawiera dwa sterowniki silników L293D oraz rejestr przesuwny 74HC595. Rejestr przesuwny rozszerza 3 linie Arduino do 8 linii, co pozwala na sterowanie kierunkiem pracy silników. Wyjście L293D jest bezpośrednio sterowane wyjściami PWM Arduino
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy . Pololu 5041
Brak towaru
Moduł 4-kanałowego sterownika silników DC z mikrokontrolerem RP2040. Pozwala na podłączenie enkoderów i jest wyposażony w złącze QW/ST. Pimoroni PIM636
RoboClaw 2x7A Motor Controller (V5B) to dwukanałowy sterownik silników prądu stałego (DC), napięcie pracy: 6-34 V, maksymalny prąd ciągły: 7,5 A, możliwość łatwej realizacji pętli sprzężenia zwrotnego z regulatorem PID, systemy bezpieczeństwa. Pololu 3284
Sterownik silnika prądu stałego (DC) o napięciu pracy 6,5-30V i maksymalnym prądzie ciągłym 27A. Posiada możliwość łatwej realizacji pętli sprzężenia zwrotnego oraz liczne interfejsy sterujące. Pololu 3148
Pololu G2 24v19 High Power to miniaturowy sterownik silnika DC. Zasilanie sterownika: 6,5...40V. Wydajność prądowa modułu: 19A. Moduł posiada zabezpieczenie przed napięciem wstecznym i przepięciami. Pololu 1367
Brak towaru
Moduł pozwala na zmianę prędkości obrotowej silnika poprzez regulację PWM o częstotliowści do 500 kHz. Posiada wbudowane zabezpieczenie przed podaniem odwrotnej polaryzacji zasilania oraz zabezpieczenie termiczne. Pololu 2960
Moduł sterownika silnika krokowego TB67S249FTG zasilanego napięciem 10-47V i prądzie pracy 1,7A. Sterownik pozwala na kontrolowanie ruchu silnika aż z 7 różnymi rozdzielczościami (do 1/32 kroku). Pololu 2973
Moduł ze sterownikiem silnika krokowego bipolarnego TC78H670FTG. Umożliwa sterowanie silnikiem z dokładnością do 1/128 kroku napięciem od 3,6 do 16 V i prądem do 2 A. SparkFun ROB-16836
Moduł ze sterownikiem silnika DC DRV8256E. Może współpracować z silnikami zasilanymi napięciem od 4,5 do 48 V i poborze prądu do 1,9 A. Pololu 4038
Moduł ze sterownikiem silnika DC MP6550. Może współpracować z silnikami zasilanymi napięciem od 1,8 do 22 V i poborze prądu do 1,7 A. Pololu 4733
Podwójny sterownik silników pozwalający na sterowanie dwóch silników DC napięciem 0-11V i prądem ciągłym 1,2A na kanał. Pololu 2135
Podwójny sterownik silników pozwalający na wysterowanie dwóch silników DC napięciem od 4,5 do 13,5V i prądem ciągłym 1,2 A na kanał. SparkFun ROB-14451
Sterownik silników krokowych, który może pracować z napięciem z zakresu od 20 do 50 V oraz maksymalnym prądem do 4,2 A. Umożliwia konfigurację mikrokroku w zakresie od 2 do 128. DM542
Sterownik silnika prądu stałego (DC) o napięciu pracy 4,5..28V i maksymalnym prądzie ciągłym 2,6A. Posiada możliwość łatwej realizacji pętli sprzężenia zwrotnego oraz liczne interfejsy sterujące. Pololu 3143
Brak towaru
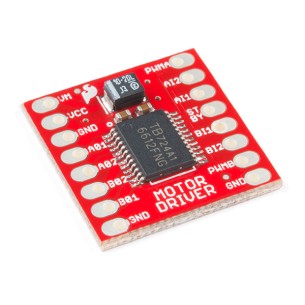
Jednokanałowy sterownik silnika DC umożliwiający sterowanie pracą silnika o napięciu zasilania z zakresu 6-30V oraz który pobiera prąd do 20A (chwilowo do 60A). Cytron MD20A
RoboClaw 2x30A Motor Controller (V5D) to dwukanałowy sterownik silników prądu stałego (DC), napięcie pracy: 6..34V, maksymalny prąd ciągły: 30A, możliwość łatwej realizacji pętli sprzężenia zwrotnego z regulatorem PID, systemy bezpieczeństwa. Pololu 3286