




- Obecnie brak na stanie









Silnik firmy Pololu z enkoderem 64 CPR, z przekładnią 19:1, standardowym napięciem pracy 12 V i prędkością 500 rpm. Pololu 2822

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
Silniki te posiadają enkoder dzięki czumu mogą być wykorzystane w projektach w których ważne jest znanie prędkości lub przebytej odległości. Zalecane napięcie pracy wynosi 12 V i przy takim napięciu silnik ma prędkość 500 rpm, prąd 300 mA bez obciążenia i 5 A przy zablokowaniu. Moment obrotowy dla tego silnika wynosi 5 kg*cm (84 oz-in). Wał silnika ma kształt litery D i średnicę 6 mm. Dłogość silnika wynosi 68 mm, a średnica 37 mm.
| Kolor | Funkcja |
|---|---|
| Czerwony | Zasilanie silnika |
| Czarny | Zasilanie silnika |
| Zielony | GND enkodera |
| Niebieski | Vcc enkodera (3,5..20 V) |
| Żółty | Wyjście A enkodera |
| Biały | Wyjście B enkodera |
Cechy
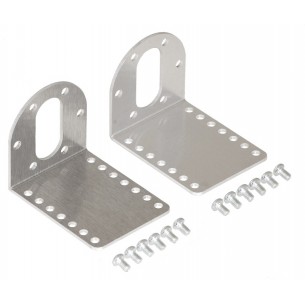
Para aluminiowych uchwytów z otworami dla śrub M3 do silników z przekłądnią 37D mm. Pololu 1084
Aluminiowy uchwyt z otworami dla śrub M3 do silników z przekłądnią 37D mm. Pololu 1995
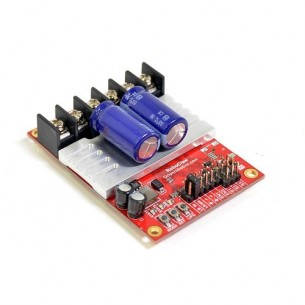
Sterownik silników dla Arduino który w prosty sposób pozwala sterować silnikami DC dużej mocy. Do 12 A na kanał dla pracy ciągłej. Pololu 2507
Brak towaru
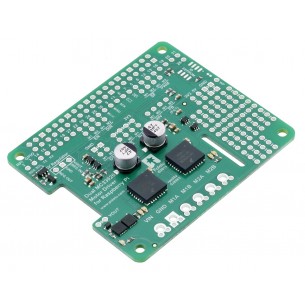
Rozszerzenie dla Raspberry Pi z dwoma sterownikami silników obsługującymi zakres napięć 5-28 V i prąd ciągły 3 A (chwilowy 5 A) każdy. Pololu 2755
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
PZmontowana płytka edukacyjna dla Arduino. AVT5636 C
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Prototypowa płytka stykowa 170 punktów o wielkości 35x47 mm w kolorze ciemnoniebieskim. Pololu 1488
Brak towaru
Zasilacz stabilizowany sieciowy z gniazdem USB (5V, 1A). Może służyć jako zasilacz lub ładowarka wszelkich urządzeń wyposażonych w gniazda USB
Brak towaru
Brak towaru
Brak towaru
Multi-Message Single-Chip Voice Record & Playback Devices, 160-480s, DIP28, Nuvoton, RoHS
Brak towaru
Brak towaru
Brak towaru
Silnik firmy Pololu z enkoderem 64 CPR, z przekładnią 19:1, standardowym napięciem pracy 12 V i prędkością 500 rpm. Pololu 2822