














221,65 zł Netto
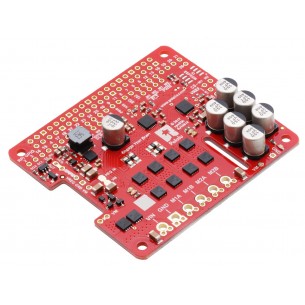
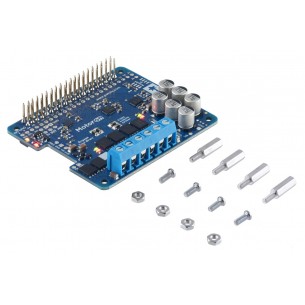
Pololu Dual G2 High-Power Motor Driver 24v14 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla Raspberry Pi. Silniki mogą być zasilane napięciem 6,5-36V i pobierać maksymalnie prąd o natężeniu do 14A. Pololu 3752

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
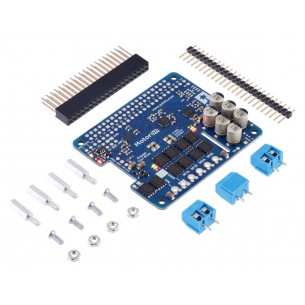
Pololu Dual G2 High-Power Motor Driver 24v14 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla Raspberry Pi. Silniki mogą być zasilane napięciem 6,5-36 V (zalecane maksymalne napięcie to 30 V) i pobierać maksymalnie prąd o natężeniu do 14 A. Sterowanie silnikiem odbywa się za pomocą sygnału PWM o częstotliwości do 100 kHz. Płytka posiada wbudowaną przetwornicę (5 V, 2.5 A) umożliwiającą zasilanie Raspberry Pi z tego samego źródła zasilania co silniki. Płytka nie ma przylutowanych złącz (śrubowych do podłączenia silników oraz zasilania, złącza 2x20 pinów do podłączania z Raspberry Pi), należy je przylutować samodzielnie. W zestawie znalazły się też niezbędne elementy montażowe (dystanse, śrubki, nakrętki) umożliwiające montaż rozszerzenia na Raspberry Pi.
Uwaga!
Komputer Raspberry Pi widoczny na zdjęciach nie wchodzi w skład zestawu, należy go dokupić osobno np. Raspberry Pi 3.
Cechy
Komputer Raspberry Pi 3 model B (Quad Core Broadcom BCM2837, 4x1.2GHz rdzeń ARM Cortex-A53, RAM 1GB, 4xUSB, Ethernet, HDMI, Wifi, Bluetooth)
Pololu Dual G2 High-Power Motor Driver 18v18 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla Raspberry Pi. Silniki mogą być zasilane napięciem 6,5-30V i pobierać maksymalnie prąd o natężeniu do 18A. Pololu 3750
Pololu Dual G2 High-Power Motor Driver 24v18 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla Raspberry Pi. Silniki mogą być zasilane napięciem 6,5-36V i pobierać maksymalnie prąd o natężeniu do 18A. Pololu 3756
Brak towaru
Pololu Dual G2 High-Power Motor Driver 18v22 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla Raspberry Pi. Silniki mogą być zasilane napięciem 6,5-30V i pobierać maksymalnie prąd o natężeniu do 22A. Pololu 3754
Brak towaru
Komputer Raspberry Pi 3 model B+ (Quad Core Broadcom BCM2837B0, 4x1.4GHz rdzeń ARM Cortex-A53, RAM 1GB, 4xUSB, Ethernet, HDMI, Wi-Fi, Bluetooth BLE)
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka ze złączami do montażu. Pololu 5055
Brak towaru
Moduł dla Raspberry Pi, dwa podwójne mostki "H", port PiFace EXTRA, RoHs
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5048
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu trzech napędów za pomocą interfejsu I2C. Pololu 5073
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5054
Brak towaru
Programowalny moduł sterownika do robota, mogący pracować samodzielnie lub pod kontrolą Raspberry PI. Moduł opiera się na mikrokontrolerze Atmel ATmega32U4, posiada złącze USB i wgrany bootloader kompatybilny z Arduino. Pololu - 3117
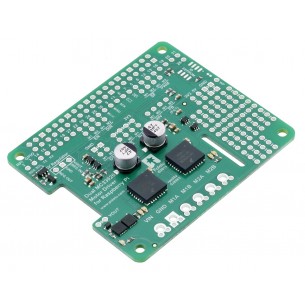
Rozszerzenie dla Raspberry Pi z dwoma sterownikami silników obsługującymi zakres napięć 5-28 V i prąd ciągły 3 A (chwilowy 5 A) każdy. Pololu 2755
Moduł pozwala połączyć zalety Raspberry Pi i Arduino, wyposażony jest w mikrokontroler ATmega32u4 z botloaderem zgodnym z Arduino i podwójny sterownik silników. Pololu 3119
Moduł sterownika serwomechanizmów PCA9685 dedykowany dla minikomputerów Raspberry Pi. Pozwala na sterowanie 16 kanałami PWM. Waveshare Servo Driver HAT (B)
Brak towaru
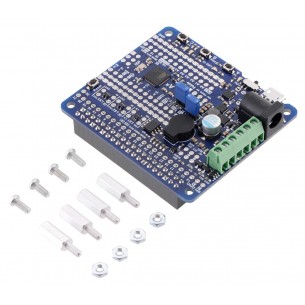
RPi Motor Driver Board to sterownik przeznaczony dla dwóch silników DC lub jednego silnika krokowego. Sterownik jest przystosowany do dołączenia do komputerów serii Raspberry Pi A+, B+, 2 B i 3 B
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka ze złączami do montażu. Pololu 5049
Brak towaru
Dual MAX14870 Motor Driver to podwójny sterownik silników DC kompatybilny z Raspberry Pi pozwalający na wysterowanie dwóch silników DC napięciem 4,5-36V prądem ciągłym 1,7A. Pololu 3759
Moduł z 2-kanałowym sterownikiem silników DC TB6612FNG przeznaczony do współpracy z Raspberry Pi. Może pracować z napięciem od 6 do 12 V i natężeniem prądu do 3 A. SB Components 21468
Pololu Dual G2 High-Power Motor Driver 18v18 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla Raspberry Pi. Silniki mogą być zasilane napięciem 6,5-30V i pobierać maksymalnie prąd o natężeniu do 18A. Pololu 3750
Moduł z 4-kanałowym sterownikiem silników DC (2 x L293D) przeznaczony do współpracy z Raspberry Pi. Może pracować z napięciem od 6 do 24 V i natężeniem prądu do 600 mA. SB Components 08001
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5057
Brak towaru
Pololu Dual G2 High-Power Motor Driver 24v14 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla Raspberry Pi. Silniki mogą być zasilane napięciem 6,5-36V i pobierać maksymalnie prąd o natężeniu do 14A. Pololu 3752