- Obecnie brak na stanie









Silnik firmy Pololu z enkoderem 64 CPR, z przekładnią 19:1, standardowym napięciem pracy 12 V i prędkością 500 rpm. Pololu 2822

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
Silniki te posiadają enkoder dzięki czumu mogą być wykorzystane w projektach w których ważne jest znanie prędkości lub przebytej odległości. Zalecane napięcie pracy wynosi 12 V i przy takim napięciu silnik ma prędkość 500 rpm, prąd 300 mA bez obciążenia i 5 A przy zablokowaniu. Moment obrotowy dla tego silnika wynosi 5 kg*cm (84 oz-in). Wał silnika ma kształt litery D i średnicę 6 mm. Dłogość silnika wynosi 68 mm, a średnica 37 mm.
| Kolor | Funkcja |
|---|---|
| Czerwony | Zasilanie silnika |
| Czarny | Zasilanie silnika |
| Zielony | GND enkodera |
| Niebieski | Vcc enkodera (3,5..20 V) |
| Żółty | Wyjście A enkodera |
| Biały | Wyjście B enkodera |
Cechy
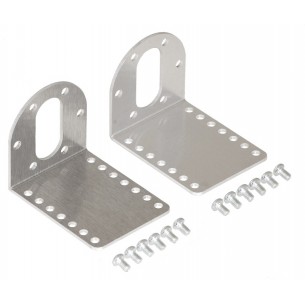
Para aluminiowych uchwytów z otworami dla śrub M3 do silników z przekłądnią 37D mm. Pololu 1084
Aluminiowy uchwyt z otworami dla śrub M3 do silników z przekłądnią 37D mm. Pololu 1995
Sterownik silników dla Arduino który w prosty sposób pozwala sterować silnikami DC dużej mocy. Do 12 A na kanał dla pracy ciągłej. Pololu 2507
Brak towaru
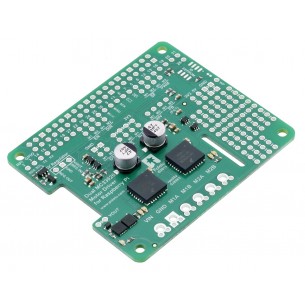
Rozszerzenie dla Raspberry Pi z dwoma sterownikami silników obsługującymi zakres napięć 5-28 V i prąd ciągły 3 A (chwilowy 5 A) każdy. Pololu 2755
Sieciowy zasilacz impulsowy 5V, 1A, kabel zakończony wtykiem mini-USB. DC/230V AC
Brak towaru
Koszyk na cztery baterie 1,5V typu AAA (R3, mały paluszek) połączone szeregowo (6V). Przewody połączeniowe o długości 15 cm. Pololu 1146
Brak towaru
Brak towaru
Brak towaru
Tamiya 72101 Gear Head Motor + Sponge Tire Set
Brak towaru
Brak towaru
Thermopad termoprzewodzący dwustronnie przylepny 20mm x 130mm x 2mm, 2.4W/mK, AG Termopasty, RoHS
Brak towaru
Filament firmy ROSA3D wykonany z wysokiej jakości granulatu PLA. Na szpuli nawinięte jest 0,8 kg filamentu o średnicy 1,75 mm. ROSA3D PLA Starter Pearl Gold
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Zestaw Basys3 z układem FPGA Artix-7 (Xilinx),wyposażony m.in. we wbudowany programator JTAG i podstawowe peryferia do testowania aplikacji, z pakietem Vivado (wersja dedykowana zestawowi, implementacja projektów wyłącznie na układ FPGA z zestawu).
Brak towaru
Wyświetlacz LCD 2x8, 58x30mm, FSTN NEGATIVE, LED backlight (white), enhanced temperature range, RoHS
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Silnik firmy Pololu z enkoderem 64 CPR, z przekładnią 19:1, standardowym napięciem pracy 12 V i prędkością 500 rpm. Pololu 2822