









36,85 zł Netto
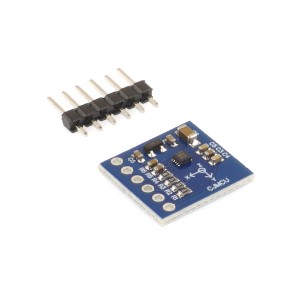
Moduł 3-osiowego magnetometru LIS3MDL firmy ST o zakresie pomiaru od ±4 do ±16 Gs. Na złącza o rastrze 2.54mm wyprowadzono interfejsy I2C i SPI. Moduł jest kompatybilny z systemami o poziomach logicznych 2.5..5.5V. Pololu 2737

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
Niewielki moduł magnetometru (kompasu) z układem LIS3MDL firmy ST. Moduł ma złącze z wyprowadzonymi interfejsami SPI i I2C o rastrze 2.54 mm, dzięki temu można go używać w popularnych płytkach stykowych. Wbudowany konwerter napięć umożliwia użycie tego magnetometru z systemami 3.3 oraz 5V.
Cechy
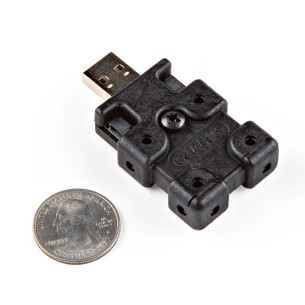
Moduł z 3-osiowym megnetometrem MMC5983MA. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-19921
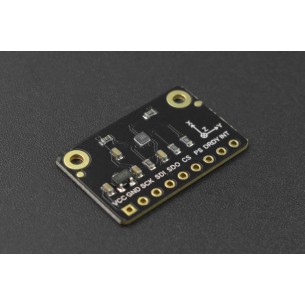
Moduł z 3-osiowym magnetometrem oparty na układzie BMM150 o zakresie pomiarowym ±1300 μT (oś x i y) oraz ±2500 μT (oś z). Komunikuje się przez interfejs I2C. DFRobot SEN0529
Moduł z 3-osiowym magnetometrem oparty na układzie BMM150. Komunikuje się przez interfejs I2C lub SPI. DFRobot SEN0419
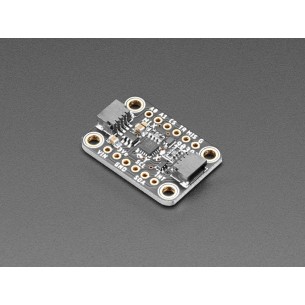
Moduł z 3-osiowym czujnikiem pola magnetycznego TLV493D. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C. Adafruit 4366
Brak towaru
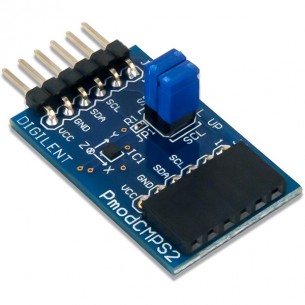
PmodCMPS2 to moduł z cyfrowym magnetometrem opartym na układzie MMC34160PJ firmy Memsic. Posiada rozdzielczość 0,5 mG (w zakresie ±16) oraz dokładność do 1°. Do komunikacji z modułem służy interfejs I2C wyprowadzony na 6-pinowym złączu Pmod. Digilent 410-355
Brak towaru
Moduł z 3-osiowym czujnikiem pola magnetycznego LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C. Adafruit 4479
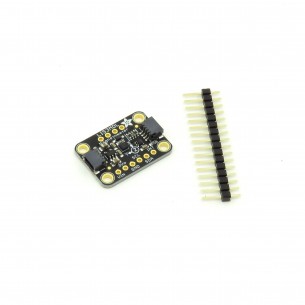
Moduł z 3-osiowym magnetometrem oparty na układzie MLX90393. Ma zakres pomiarowy od ±5mT do ±50mT i rozdzielczość 0,161 µT. Do komunikacji wykorzystywany jest interfejs I2C lub SPI. Adafruit 4022
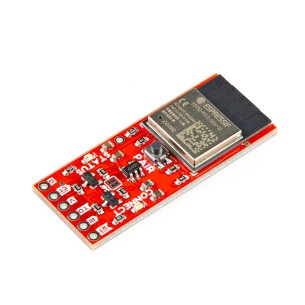
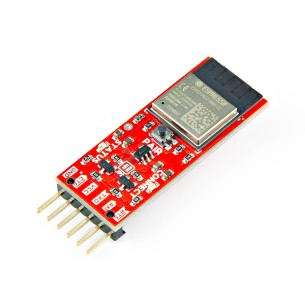
Niewielki moduł z 3-osiowym magnetometrem opartym na układzie MLX90393 firmy Melexis. Jego rozdzielczość to 0,161 µT. Do komunikacji wykorzystywany jest interfejs I2C lub SPI. Interfejs I2C został wyprowadzony na złączach zgodnych z standardem Qwiic. SparkFun SEN-14571
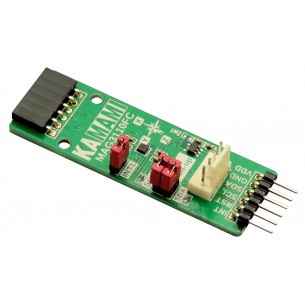
KAmodMAG3110FC to moduł z czujnikiem pola magnetycznego MAG3110FC firmy NXP. Czujnik umożliwia pomiar pola magnetycznego w zakresie ±1000 μT, z czułością 0,1 μT. Interfejs I2C. Płytka wyposażona została z złącze standardu Pmod I2C oraz w złącze KAMAMI.
Moduł z 3-osiowym magnetometrem BMM150. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C. Seeed Studio 101020492
Moduł z 3-osiowym czujnikiem pola magnetycznego MMC5603. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C. Adafruit 5579
Moduł z 3-osiowym magnetometrem HMC5883L, który pozwala na pozmiar pola magnetycznego w zakresie ±8 Gauss. Komunikacja przez interfejs I2C
Brak towaru
Moduł z 3-osiowym magnetometrem MAG3110 to kompaktowe i energooszczędne rozwiązanie, które umożliwia precyzyjne pomiary wartości pola magnetycznego w trzech osiach, obsługuję komunikację I2C, co sprawia, że jest idealnym wyborem dla różnorodnych zastosowań w systemach elektronicznych i mikrokontrolerowych
Brak towaru
Moduł z 3-osiowym cyfrowym kompasem, HMC5983, I2C, SPI, RoHS
Moduł z 3-osiowym magnetometrem oparty na układzie BMM150. Komunikuje się przez interfejs I2C lub SPI. Waveshare BMM150 3-Axis Magnetometer Sensor
Niewielki moduł z 3-osiowym ccyfrowym magnetometrem opartym na układzie QMC5883. Komunikacja z układem odbywa się za pomocą interfejsu I2C. Wbudowany konwerter stanów logicznych. GY-271
Brak towaru
Moduł 3-osiowego magnetometru LIS3MDL firmy ST o zakresie pomiaru od ±4 do ±16 Gs. Na złącza o rastrze 2.54mm wyprowadzono interfejsy I2C i SPI. Moduł jest kompatybilny z systemami o poziomach logicznych 2.5..5.5V. Pololu 2737