





















637,85 zł Netto

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
Ten siłownik liniowy 12 V może być używany w różnych wymagających zastosowaniach. Silnik wyposażony jest w przekładnię redukcyjną 20: 1, która zapewnia siłownikowi obciążenie dynamiczne 50 kg (110 funtów) i maksymalną prędkość 0,5 cala / s (1,3 cm / s), a także wytrzymuje obciążenie do 500 funtów, gdy się nie rusza. Wyłączniki krańcowe na każdym końcu sprawiają, że siłownik można łatwo kontrolować w całym zakresie ruchu, a napęd ślimakowy zapewnia, że wałek utrzyma swoją pozycję nawet bez zasilania. Ta wersja ma 10-calowy skok i wbudowany potencjometr do sprzężenia zwrotnego położenia.
 |
| Siłownik liniowy bez sprzężenia zwrotnego, otwierany w celu pokazania biegów. |
|---|
Seria LD siłowników liniowych firmy Concentric International (dawniej Iowa Export-Import) to motoreduktory 12 V DC, które wykorzystują napęd ślimakowy do przesuwania wału tam iz powrotem wzdłuż jego długości. Napęd ślimakowy zapewnia, że wał będzie utrzymywał swoją pozycję nawet bez zasilania. Dwa wyłączniki krańcowe bezpiecznie zatrzymują silnik na każdym końcu jego zakresu, a diody pozwalają na zmianę kierunku po osiągnięciu punktu granicznego. Siłowniki są w większości metalowe, a cała obudowa jest uszczelniona w celu ochrony przed pyłem i wodą (stopień ochrony IP63).
 |
|
Podłączanie wspornika do jednego końca siłownika liniowego Concentric LD.
|
|---|
Siłowniki liniowe Concentric serii LD są dostępne w różnych długościach iz opcjonalnymi potencjometrami, które są połączone z położeniem wału, do stosowania w układach sprzężenia zwrotnego. Dostępnych jest również kilka długości z dwoma przełożeniami: 5: 1 i 20: 1. Wersje 5: 1 mają niższe obciążenia znamionowe - dynamiczne 34 funty, statyczne 450 funtów - ale pozwalają na większe prędkości, do 1,7 cala / s. Wersje 20: 1 są wolniejsze - do 0,5 cala / s - ale są przystosowane do obciążeń dynamicznych do 110 funtów i obciążeń statycznych do 500 funtów.
| Stroke length | 20:1 | 20:1 w/feedback | 5:1 | 5:1 w/feedback |
|---|---|---|---|---|
| 2” | LACT2-12V-20 | LACT2P-12V-20 | ||
| 4” | LACT4-12V-20 | LACT4P-12V-20 | LACT4-12V-5 | LACT4P-12V-5 |
| 6” | LACT6-12V-20 | LACT6P-12V-20 | ||
| 8” | LACT8-12V-20 | LACT8P-12V-20 | ||
| 10” | LACT10-12V-20 | LACT10P-12V-20 | ||
| 12” | LACT12-12V-20 | LACT12P-12V-20 | LACT12-12V-5 | LACT12P-12V-5 |
Posiadamy również standardowe siłowniki liniowe, które mogą być ogólnie używane jako tańsze alternatywy dla tych z Concentric; Tabela na naszej stronie z kategoriami siłowników liniowych może pomóc w znalezieniu siłownika o kombinacji prędkości i siły, która najlepiej spełnia wymagania projektu.

|
|
Siłownik liniowy ze sprzężeniem zwrotnym, skok 4 "(LACT4P), wał całkowicie wysunięty.
|
|---|
Aby przetestować siłownik, wystarczy podłączyć źródło zasilania do 12 V do przewodów silnika. Odwrócenie przyłożonego napięcia spowoduje odwrócenie kierunku ruchu. Sterownik silnika lub sterownik silnika jest wymagany do elektronicznej kontroli prędkości i kierunku. Zalecamy nasze sterowniki silników Jrk do użytku z siłownikami ze sprzężeniem zwrotnym oraz Pololu Simple Motor Controller 18v7 do sterowania siłownikami bez sprzężenia zwrotnego, chociaż wiele innych naszych sterowników silników i sterowników silników jest w stanie zasilać ten siłownik.
Te siłowniki mają prąd utyku 10 A przy 12 V, ale będą pobierać średnio znacznie mniej niż ten, gdy są używane w ramach ich znamionowego obciążenia. Pobierają około 500 mA bez obciążenia i mogą przekroczyć 3 A przy maksymalnym znamionowym obciążeniu dynamicznym, więc stwierdziliśmy, że generalnie dobrze współpracują z naszym sterownikiem silnika jrk 21v3 o niższej mocy ze sprzężeniem zwrotnym (więcej informacji na dole tej strony można znaleźć na ten sterownik do sterowania położeniem siłownika liniowego w pętli zamkniętej). Należy jednak pamiętać, że siłowniki mogą na chwilę zbliżyć się do pełnego prądu utyku, gdy zostaną nagle uruchomione lub przy nagłej zmianie kierunku. Takie skoki prądu można stłumić, jeśli podejmiesz kroki w celu ograniczenia przyspieszenia siłownika (wiele naszych sterowników silników oferuje opcjonalne ograniczanie przyspieszenia).
 |
|
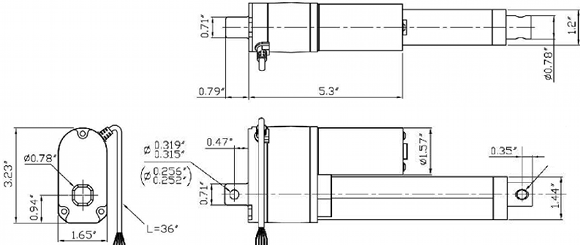
Rysunek wymiarowy siłowników liniowych Concentric LD ze sprzężeniem zwrotnym.
|
|---|
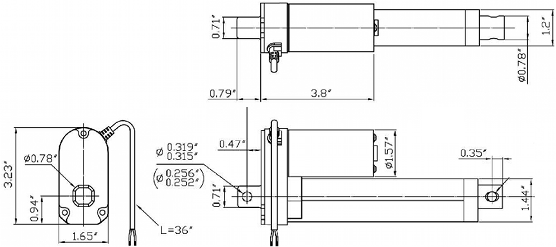 |
| Rysunek wymiarowy siłowników liniowych Concentric LD bez sprzężenia zwrotnego. |
|---|
Każdy siłownik ma kabel o długości 3 stóp. W siłownikach ze sprzężeniem zwrotnym kabel jest zakończony specjalnymi złączami żeńskimi, jak pokazano na lewym rysunku poniżej, jednym dla trzech przewodów potencjometru, a drugim dla dwóch przewodów zasilających. Złącza te pasują do męskich wersji przedłużacza do siłowników liniowych LD. Wersje siłownika bez sprzężenia zwrotnego mają dwa niezakończone, odizolowane przewody zasilające, jak pokazano na prawym obrazku poniżej. Siłowniki liniowe bez sprzężenia zwrotnego nie mają kabli kompatybilnych z przedłużaczem siłownika liniowego.
|
|
Funkcja sprzężenia zwrotnego zawarta w naszych sterownikach silników jrk czyni je doskonałym rozwiązaniem do precyzyjnego sterowania naszymi siłownikami liniowymi ze sprzężeniem zwrotnym. Nasz plik ustawień dla narzędzia konfiguracyjnego jrk ułatwia konfigurację, eliminując potrzebę kalibracji sprzężenia zwrotnego i dostrojenia stałych PID. Aby rozpocząć, wykonaj poniższe czynności:
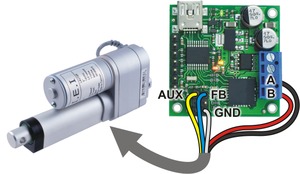 |
| Connecting a LACTxP linear actuator with feedback to a jrk 21v3 motor controller. |
|---|
Podłączenie siłownika liniowego LACTxP ze sprzężeniem zwrotnym do sterownika silnika JRK 21v3.
Chociaż ten plik ustawień zapewnia precyzyjną kontrolę nad większością zakresu siłownika, można zauważyć obniżenie wydajności bardzo blisko wartości ekstremalnych z powodu wyłączników krańcowych. Jeśli projekt wymaga lepszej kontroli w pobliżu granic siłownika, może zajść potrzeba ponownej kalibracji ustawień sprzężenia zwrotnego dla konkretnego siłownika.
 |
Mounting Bracket for Concentric LD Linear Actuators |
Miniaturowy siłownik liniowy, który oferuje posuw do 30 mm przy prędkości od 3 do 5 mm/s. Ma zabudowany silnik i jest zasilany napięciem od 3 do 6 V
Drut ze stopu niklowo-tytanowego o długości 30 cm z pamięcią kształtu. Kiedy jest w formie martenzytycznej, może być dowolnie wyginany odkształcany. Po przyłożeniu natężenia prądu o wartości ok. 200 mA lub ogrzaniu do temperatury 100°C drut wraca do pierwotnego kształtu. SparkFun COM-11899
Brak towaru
Memory Metal Actuator - NM706
Solenoid liniowy o nominalnym napięciu pracy 36 V. Pozwala na wywołanie ruchu liniowego w celu przesuwania elementów lub sterowania przełącznikami i dźwigniami. SparkFun ROB-10391
Siłownik liniowy LACT12P-12V-20 ze sprzężeniem zwrotnym, o wysuwie 30 cm, nominalnym napięciu zasilania 12 V i prędkości wysuwu 15 mm/s. Pololu 2313
Brak towaru
Siłownik liniowy średniego obciążenia (medium-duty), pozwala podnosić obciążenie do 100 kgf (1000 N) i wytrzymywać obciążenie statyczne do 450 kgf (4500 N), nominalny wysuw siłownika wynosi 10 cm. Napięcie zasilania wynosi 12 V. Ta wersja siłownika posiada wbudowany potencjometr, co na odczyt pozycji siłownika lub np. implementacje sprzężenia zwrotnego. Pololu 3612
Brak towaru
Siłownik liniowy LACT10P-12V-20 ze sprzężeniem zwrotnym: skok 10 ", 12 V, 0,5" / s
Brak towaru
Brak towaru
Miniaturowy siłownik liniowy, który oferuje posuw do 50 mm przy prędkości od 3 do 5 mm/s. Ma zabudowany silnik i jest zasilany napięciem od 3 do 6 V
Przetwornica DC-AC, określana również jako inwerter. Konwertuje stałe napięcie (DC) o wartości 12 V na zmienne napięcie (AC) o wartości 220 V, 380 V lub 18 V
Brak towaru
Miniaturowy siłownik liniowy, który oferuje posuw do 100 mm przy prędkości od 3 do 5 mm/s. Ma zabudowany silnik i jest zasilany napięciem od 3 do 6 V
Brak towaru
Brak towaru
Miniaturowy siłownik liniowy, który oferuje posuw do 80 mm przy prędkości od 3 do 5 mm/s. Ma zabudowany silnik i jest zasilany napięciem od 3 do 6 V
Brak towaru

















